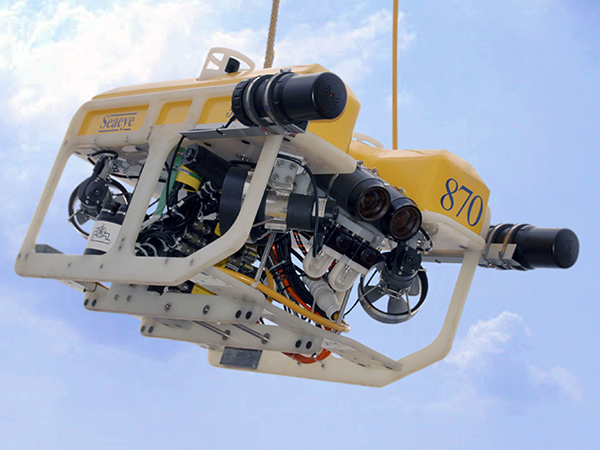
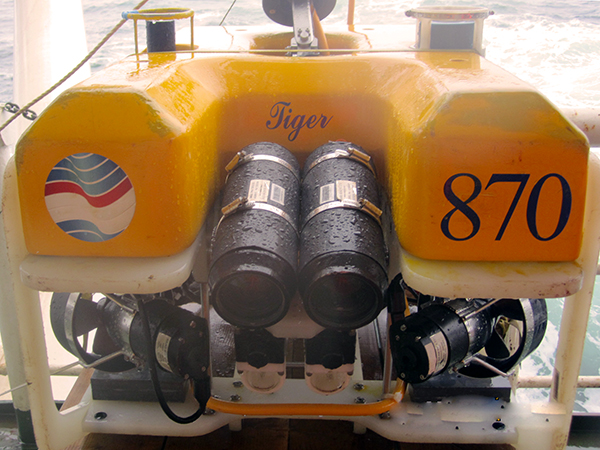
Телеуправляемый необитаемый подводный аппарат Seaeye Tiger предназначен для выполнения поиска и обследования подводных объектов, выполнения подводно-технических работ в объеме возможностей установленного гидрографического оборудования.
Система ТПА Seaeye Tiger может использоваться для выполнения широкого круга задач:
- Контроль положения трубопроводов на грунте и выявление свободных пролетов (провисов), оценки их размеров при использовании системы профилемеровTritech Super Seaking Dual Frequency Profiler (DFP);
- Обнаружение и контроль глубины залегания трубопроводов, кабелей и иных конструкций, находящихся ниже уровня грунта при использовании системы донного профилемера Tritech SeaKing Parametric Sub Bottom Profiler (SBP);
- Площадная съемка рельефа дна и обнаружение объектов на грунте (в том числе трубопроводов и иных объектов техногенного и природного происхождения) при использовании гидролокатора бокового обзора Tritech SeaKing SideScan Sonar (SSS).
- Комплексное обследование подводных трубопроводов и подводных частей гидротехнических сооружений;
- Проведение инспекций подводных трубопроводов и подводных частей гидротехнических сооружений;
- Визуальный и инструментальный контроль выполнения операций в ходе подводно-технических работ;
- Техническая поддержка водолазных работ.
Основные технические характеристики ТПА Seaeye Tiger:
Глубина погружения (в комплектации
с устройством глубоководного погружения), м |
1000 |
| Глубина погружения (в плавательном варианте), м |
300 |
Вес в воздухе
(без дополнительного оборудования), кг |
139 |
| Длина максимальная, мм |
1030 |
| Ширина, мм |
700 |
| Высота, мм |
590 |
| Скорость движения вперед/назад, узлы |
3 |
| Скорость движения лагом, узлы |
1,5 |
| Скорость движения вертикальная, узлы |
1,5 |
| Упор движителей при движении вперед/назад, кгс |
62 |
| Упор движителей при движении лагом, кгс |
43 |
| Упор движителей при движении вверх/вниз, кгс |
22 |
| Полезная нагрузка, кг |
32 |
Оператор (пилот) ТПА на поверхности дистанционно управляет подводным аппаратом, путем подачи команд по электрическому составному кабелю. Подводный аппарат может двигаться в любом направлении, или, при использовании режимов автопилота, поддержание заданного курса и (или) поддержание заданной глубины - оставаться точно на заданном оператором курсе и (или) глубине. Оператор может также управлять системой видеонаблюдения подводного аппарата, осветителями и любым другим оборудованием, установленным в зависимости от комплектации системы и возложенных на неё задач.